|
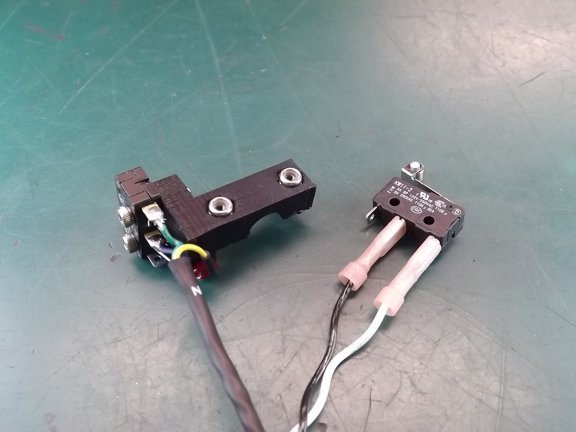
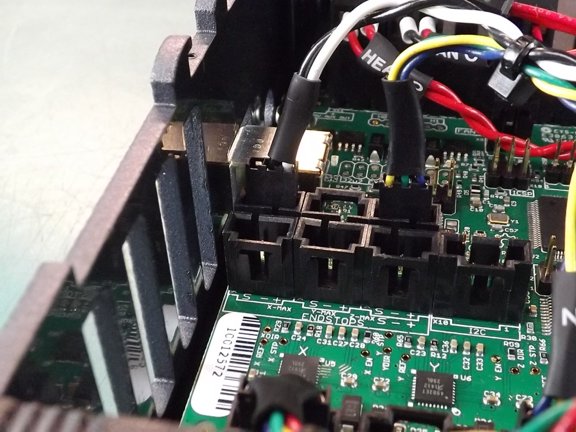
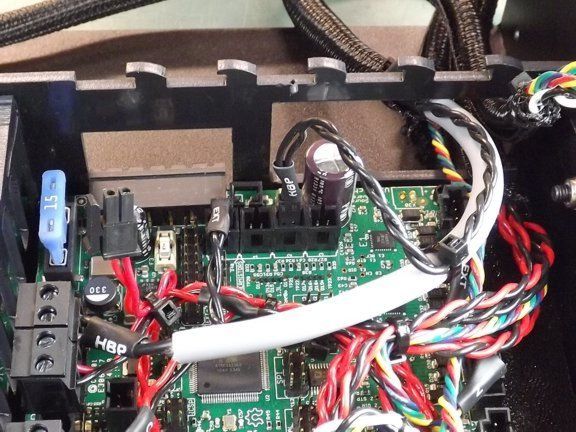
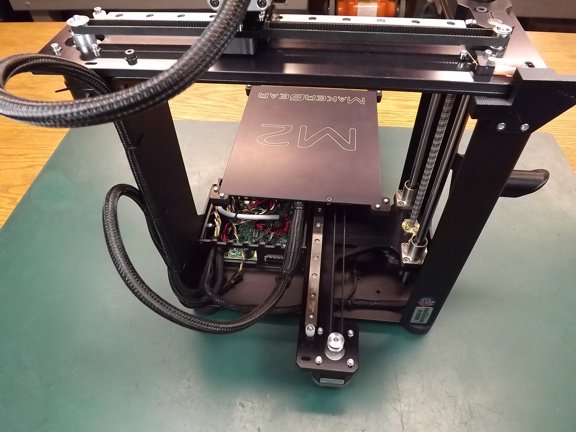
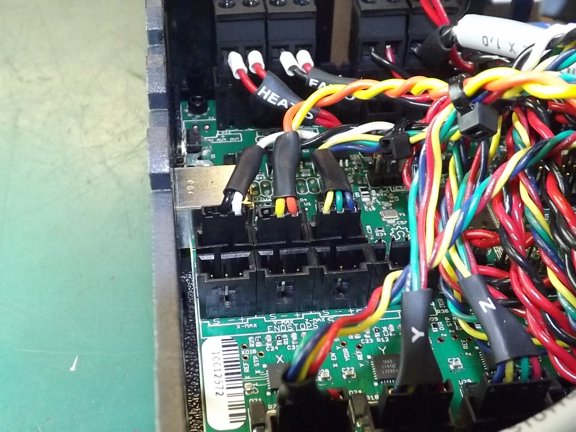
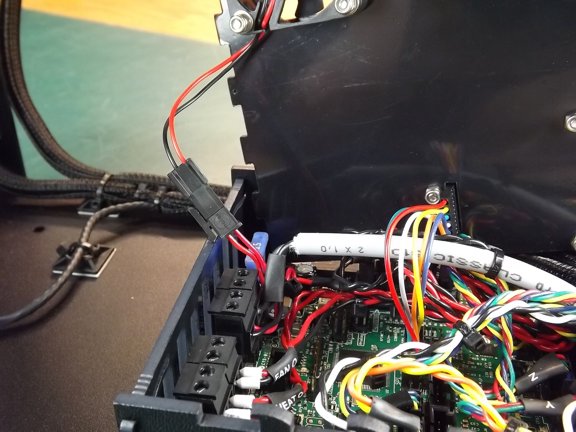
Next the X-axis end stop connector plugs into the X-axis minimum port on the RAMBo board as seen below. The white wire is positioned so that it is toward the middle of the board (right). Note: Flipping any of the X, Y or Z end stop connectors around on the board could cause a short circuit and damage the board. Make sure they are in right before powering the board.
|