THE SAIL-CAM PROJECTBy Don Giandomenico November 27,2006
Note: Since this article has been written there have been many advancements in wireless video technology. The electronics used in this article may be outdated and unavailable in the current market. This article remains on this site as a reference and record of the Sail-Cam Project and should be cited accordingly.
I have been experimenting with airborne video for a few years now and I have always wanted to build an all-electric video platform plane. The advantages of an electric powered platform over a gas powered model are numerous. Low airframe vibration, clean operation and overall ease of use are the key reasons I want to experiment with an electric video platform.
My current video platform plane is my Video Cub and it is powered by a glow fuel engine. Unfortunately the mechanics of a reciprocating engine cannot be completely balanced so airframe vibration is inevitable. This can cause problems with picture stabilization from cameras mounted on such aircraft. I have had to develop counter vibration measures to stabilize the camera on my cub which unfortunately added a lot of weight to the airframe. A simple electric powered airplane would solve most if not all of the vibration problems I had encountered with my video cub. A well balanced electric power plant creates very little vibration and in effect will require virtually no camera stabilization efforts. Electronic components dont do very well with vibration so the advantages go far beyond picture quality. The ability of being ready to fly at a moments notice is also an attractive feature of electric flight, just plug in a battery and go. This will make the use of this platform much easier than my video cub as it has to be fueled and started before each flight. The video cub also has to be cleaned as the glow fuel sprays most of the tail section of the plane. With all of these issues in mind I set out to find a suitable airframe to use as my new video platform. I had visited our local flying field a few weeks prior to this project to compete in a pylon race and ran into a fellow pilot Dennis Steir. He was trying out a new sail plane he had built and I was impressed with the bird quite a bit. Dennis had modified the sail plane with a motor pylon he had built and it flew quite well. So much so it sparked an idea for me to use this configuration on a new electric camera ship. I was very excited to learn more about the sail plane Dennis was flying and who made it Turns out that the plane Dennis was flying was a Multiplex Easy Glider and it is a 71 wingspan sail plane made from molded EPP foam. EPP foam is Expanded PolyPropylene foam that has impressive compressive strength and durability to impact. This is an attractive feature of EPP as it is easy to damage a wood framed aircraft. With the exception of a carbon-fiber spar, the Easy Glider is completely made of this virtually indestructible EPP foam. This makes the Easy Glider tough and very economical choice for a camera ship. The Easy Glider comes in a few configurations including one with a pre-installed electric motor in the nose and receiver ready models that include all of the servos. I wanted to use a similar configuration as Dennis had and mount the motor above the wing on a pylon as to allow me to put my camera in the nose of the plane. For this reason I purchased the regular sail plane version of the easy glider which is designed without a motor system. I also picked up a few servos and a new brushless motor system for a powerplant. As part of my experiment I wanted to incorporate a flight stabilization system into my Sail-Cam project that would help the plane keep a level flight attitude in case of remote control radio interference or loss of visual contact with the plane. This feature will allow me to better control the Sail-Cam while flying-by-wire and act as a bit of insurance policy. Of course the AMA does not allow the use of video link systems as a sole form of visual control for model aircraft so I will use a buddy-box and a spotter as a fail-safe while flying-by-wire. This is an easy and safe solution to the AMA rule and allows a pilot to experience what it is like to fly from the cockpit. In my opinion it is the closest thing you will get to flying full-scale aircraft without leaving the ground.
After gathering up all of the parts required for the build I decided to take a closer look at the Multiplex Easy Glider ARF. I carefully unpacked the Easy Glider and inspected all of the parts. I was very impressed with the sophisticated yet simple design of the Easy Glider. I was equally impressed with the quality of the planes construction. It is very apparent that a lot of thought went into the design of the Easy Glider. The airframe comes in eight pieces which are made from injection molded EPP foam. The manufacturer calls it Elapore and it is very light an durable. Because of the Elapores composition, it is ideal to use with Cyanoacrylate glues which makes building the Easy Glider, well........ easy :0) CA kicker can also be used to accelerate the glues drying time and in effect make it even easier.
I was taken back by the thought put into the kit as I opened the supplied instruction manual and discovered the CD-ROM media disk. The disk had a instructional video documenting the complete assembly of the model as well as a military grade computer generated product overview. The instruction manual was fairly straight forward but had many different languages to sift through before finding the English version of the text.
I had purchased a few Hitec HS-81 servos and HS-55 servos for the control surfaces along with some servo extensions which are required for the kit. I planned on using some of the existing Li-Po batteries I had to power the plane and the video transmitter. A 11.1 volt 2100 mAh pack will drive the receiver and motor and a 11.1 volt 1320 mAh will be used for the video transmitter and camera.
After researching the different types of brushless motor systems out there for use with my sailplane I decided to use a Great Planes Ultrafly motor and speed control. I purchased an Ultrafly Apollo 12 programmable electronic speed control and a Ultrafly B/06/12 1200 KV motor for my propulsion powerplant. I used the 1200 KV (1200 RPMs per 1 volt applied) motor because it matched my needs exactly. This brushless motor draws only 8 amps at full throttle When coupled to a 7 X 4 APC Slow-Flyer prop. This equates into a longer flying time and allows me to use a smaller prop compared to what a 1000 KV motor would require. A smaller prop is what I need as I dont want the motor to sit too high on the planes back for thrust angle reasons.
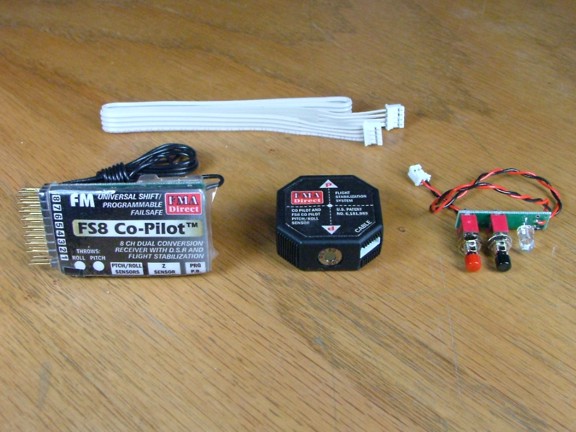
The flight stabilization system I purchased was a FMA Direct FS8 Co Pilot system which utilizes an infrared sensor array to detect the horizon line and actively keep a planes attitude level in the event of a signal failure of loss of sight issue. This system works incredibly well as I have already used it on my video cub plane. You can literally turn off your transmitter and the plane will hold a level flight attitude with an option of individual channel fail-safe programming.
The basic version of the FS8 Co Pilot consists of a receiver, external switch assembly and a pitch/roll sensor. The pitch/roll sensor mounts on the plane and relays the planes attitude to the computerized receiver which in turn helps keep the plane flat and level when instructed to. The FS8 has an adjustable gain control that allows the pilot to control how much authority the FS8 has over the control surfaces. On the extreme on setting the FS8 will allow the pilot to pitch and roll the plane at a bare minimum keeping it as level as it can. This setting is good for learning pilots and those who have trouble following a planes orientation. The off setting of the FS8 has no effect on the planes attitude during flight but can be set up to fail-safe to an on setting if the radio signal is too weak or interrupted. This feature is really unique as the plane will right itself and continue to fly even with a transmitter failure
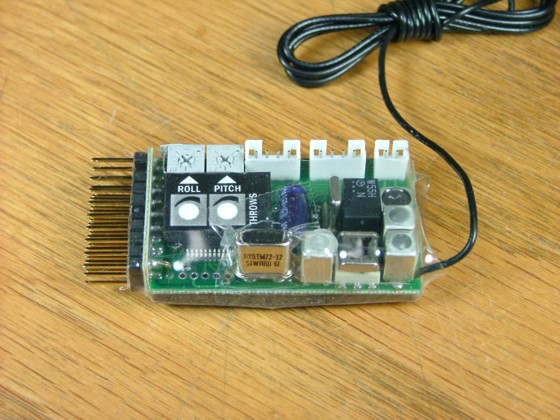
The fail-safe function has its limitations though as there is no way to automatically control altitude or heading of the plane while in fail-safe mode. The manufacturer suggest programming the FS8 to make a gradual rudder turn with a slight decent under 1/4 throttle. This way you have a maximum amount of time to regain radio control with the plane before it lands. I plan to use the FS8 at a minimum authority setting where it will right the airplane if I let go of the sticks but leave me a maximum amount of pilot control (more on that later). The FS8 receiver is an incredibly light unit making it a very attractive for my purposes as I intend to keep my planes overall weight down. Note below that the receiver crystal in installed and taped in place with clear tape.
The video link system I chose to use is the same one I use on my Video Cub plane. It is a 900 MHz ATV (Amateur Television) video link system which requires a Technician Class Amateur Radio operators license to operate. Using the 900 MHz ATV band has proven to me to be the best frequency for use with 72 and 50 MHz remote control receivers. Other 434 MHz and 2.4 GHz systems I have experimented with have caused receiver interference which in turn can cause a crash which nobody wants. The 900 MHz band seems to have the most stable signal compared to 1.2 & 2.4 GHz systems as the lower frequency radio waves can propagate around obstructions better than the higher frequencies. Microwaves have difficulty with obstructions and in turn produce more dropouts for the same amount of energy transmitted. This is why I feel the 900 MHz band is the best. I will be using the Supercircuits AVX900T4 audio/video ATV transmitter along with the AVX900R1 receiver for my video link. The 3/4 Oz AVX900T4 produces a powerful 500 Mw video transmission and draws only 250 mA @ 12 volts. The video link can obtain ranges of over a mile, line-of-sight with beautiful color and clarity. Getting a Tech license is not difficult and can be a rewarding hobby to boot. I have been a Tech for 16 years now (N6YIY) and enjoy amateur radio as one of my many hobbies. I suggest that anyone interested in using the 900 MHz ATV bands do it legally and get your license, its easy :0) For more information on getting your HAM license clickhere.
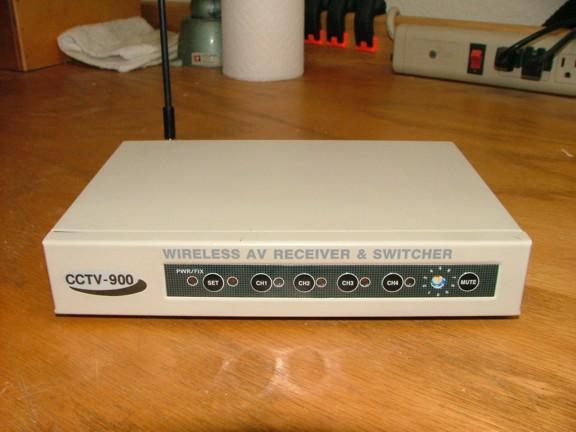
The AVX900R1 receiver (below) is a FM phase lock loop receiver capable of drift-free reception. This imported model is capable of receiving four separate channels but is only used on channel one with this system.
The camera I will be using on this project is a Supercircuits PC75WR bullet camera which utilizes a Sony 1/3 EX-View CCD imager chipset. The Sony camera produces 380 TV lines of resolution and draws 100 mA @ 12 volts. This camera produces a beautiful picture and only weighs 1.6 Oz including its weatherproof aluminum enclosure (more on this camera later).
To get the project rolling I had to figure out how I was going to fit all of these parts into the Easy Glider. This was a very important step as the parts need to be installed in such a way to allow for proper balancing of the aircraft. I decided to start out with the most heavy components which are the batteries. I situated the 2100 pack and the 1320 pack where I guessed they would effect the CG (Center of Gravity) the least. I layed out the fuselage parts on the workbench and tried out different layout configurations. After some debate I settled on putting the heavier 2100 pack under the CG and the lighter 1320 pack in the middle of the cockpit area.
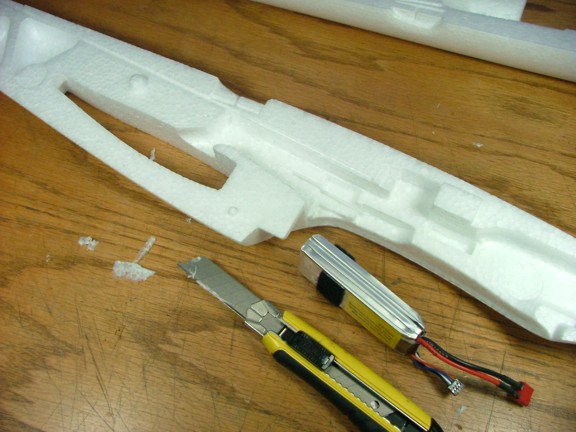
To make a cavity for the 2100 pack to fit I cut the EPP foam to form a slot just under the wing saddle. I then used the cut out wedge pieces to form a support for the 2100 pack. I use a Stanley 10-480 razor knife (seen below) for all of my foam cutting. I has a retractable blade that can be exposed up to 3. It is a necessity for making deep cuts into foam.
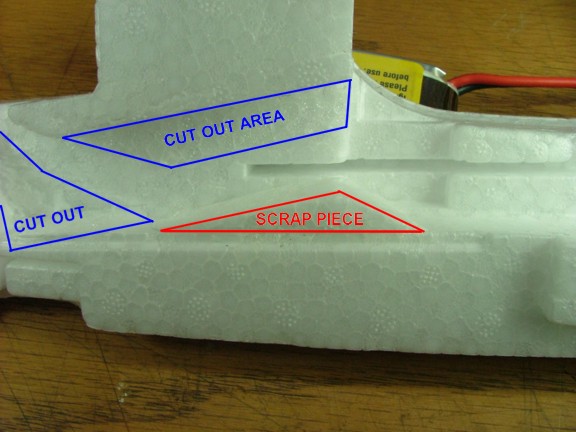
Notice the wedge cuts that are glued into the bottom of the battery slot. They were made from scrap pieces of foam from the upper part of the original servo wire tunnel as seen below.
I temporarily taped the fuselage halves together and test fit the 2100 pack in its new slot. Mounting the pack close to the CG will keep the nose weight down and give me more room for my video equipment.